CSE559A Lecture 25
Geometry and Multiple Views
Cues for estimating Depth
Multiple Views (the strongest depth cue)
Two common settings:
Stereo vision: a pair of cameras, usually with some constraints on the relative position of the two cameras.
Structure from (camera) motion: cameras observing a scene from different viewpoints
Structure and depth are inherently ambiguous from single views.
Other hints for depth:
- Occlusion
- Perspective effects
- Texture
- Object motion
- Shading
- Focus/Defocus
Focus on Stereo and Multiple Views
Stereo correspondence: Given a point in one of the images, where could its corresponding points be in the other images?
Structure: Given projections of the same 3D point in two or more images, compute the 3D coordinates of that point
Motion: Given a set of corresponding points in two or more images, compute the camera parameters
A simple example of estimating depth with stereo:
Stereo: shape from “motion” between two views
We’ll need to consider:
- Info on camera pose (“calibration”)
- Image point correspondences
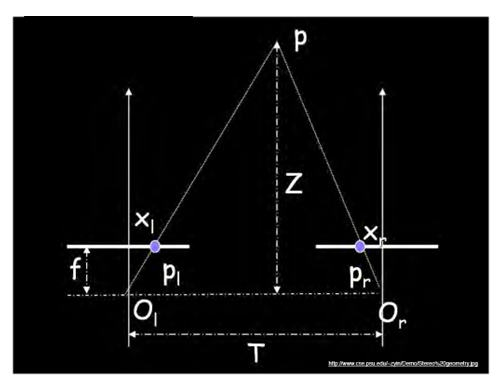
Assume parallel optical axes, known camera parameters (i.e., calibrated cameras). What is expression for Z?
Similar triangles and :
Camera Calibration
Use an scene with known geometry
- Correspond image points to 3d points
- Get least squares solution (or non-linear solution)
Solving unknown camera parameters:
Method 1: Homogenous linear system. Solve for m’s entries using least squares.
Method 2: Non-homogenous linear system. Solve for m’s entries using least squares.
Advantages
- Easy to formulate and solve
- Provides initialization for non-linear methods
Disadvantages
- Doesn’t directly give you camera parameters
- Doesn’t model radial distortion
- Can’t impose constraints, such as known focal length
Non-linear methods are preferred
- Define error as difference between projected points and measured points
- Minimize error using Newton’s method or other non-linear optimization
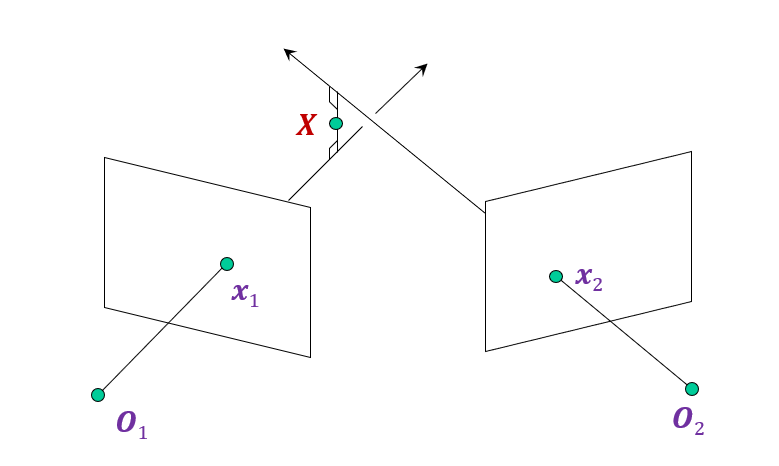
Triangulation
Given projections of a 3D point in two or more images (with known camera matrices), find the coordinates of the point
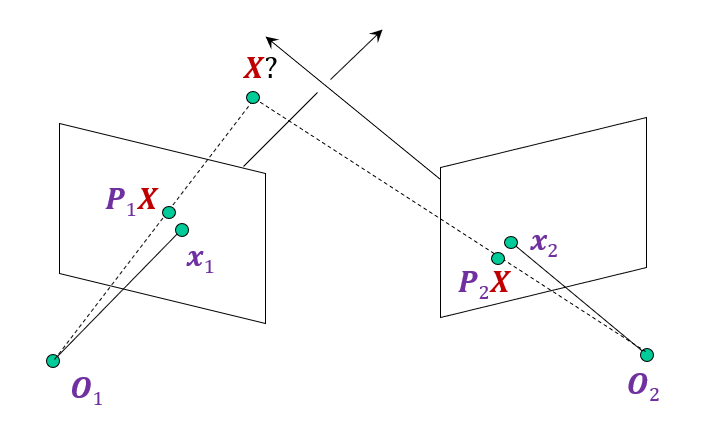
Approaches 1: Geometric approach
Find shortest segment connecting the two viewing rays and let be the midpoint of that segment
Approaches 2: Non-linear optimization
Minimize error between projected point and measured point
Approaches 3: Linear approach
and
and
and
Rewrite as:
Using singular value decomposition, we can solve for
Epipolar Geometry
What constraints must hold between two projections of the same 3D point?
Given a 2D point in one view, where can we find the corresponding point in the other view?
Given only 2D correspondences, how can we calibrate the two cameras, i.e., estimate their relative position and orientation and the intrinsic parameters?
Key ideas:
- We can answer all these questions without knowledge of the 3D scene geometry
- Important to think about projections of camera centers and visual rays into the other view
Epipolar Geometry Setup
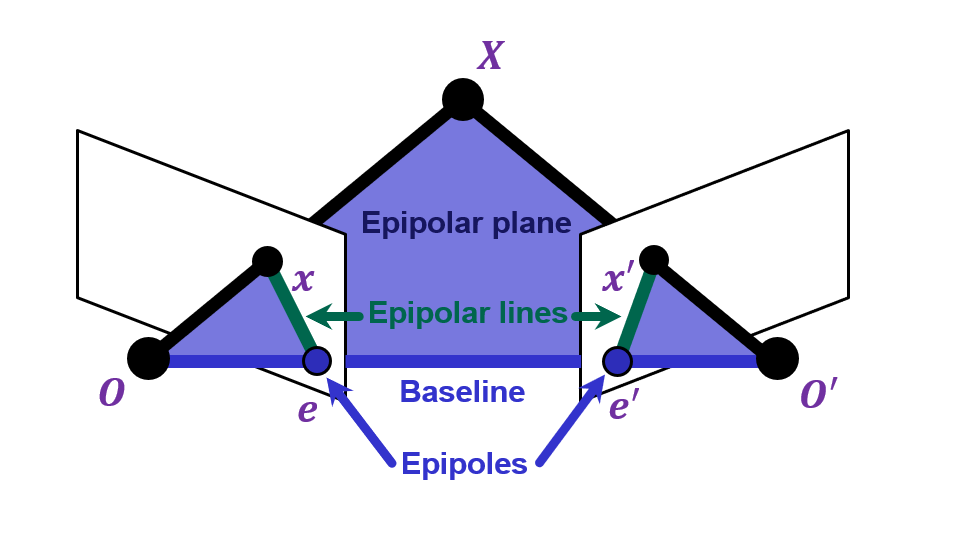
Suppose we have two cameras with centers
The baseline is the line connecting the origins
Epipoles are where the baseline intersects the image planes, or projections of the other camera in each view
Consider a point , which projects to and
The plane formed by is called an epipolar plane There is a family of planes passing through and
Epipolar lines are projections of the baseline into the image planes
Epipolar lines connect the epipoles to the projections of Equivalently, they are intersections of the epipolar plane with the image planes – thus, they come in matching pairs.
Application: This constraint can be used to find correspondences between points in two camera. by the epipolar line in one image, we can find the corresponding feature in the other image.
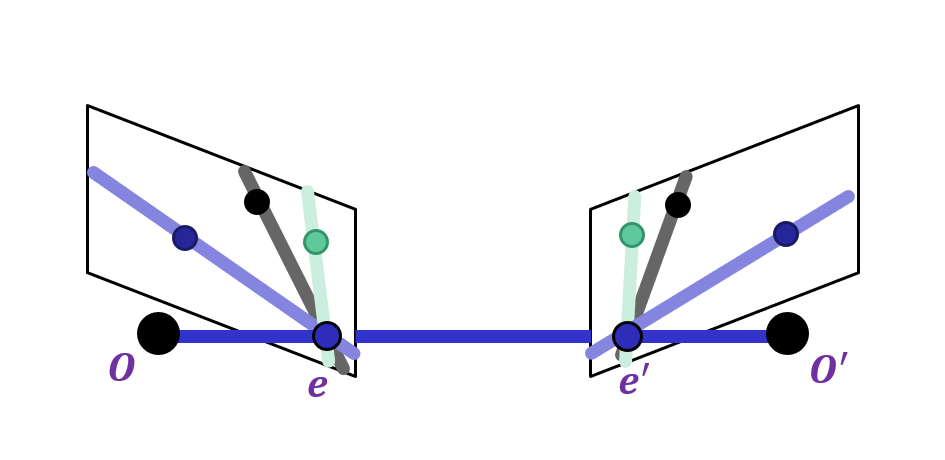
Epipoles are finite and may be visible in the image.
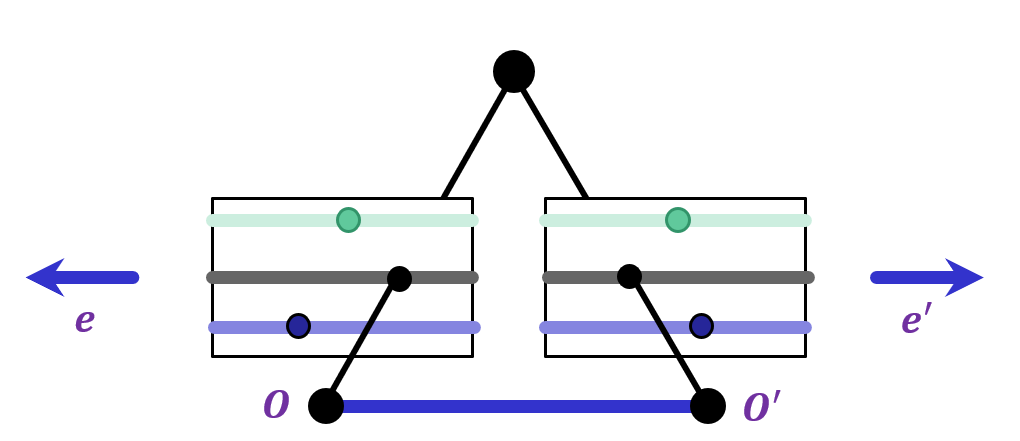
Epipoles are infinite, epipolar lines parallel.
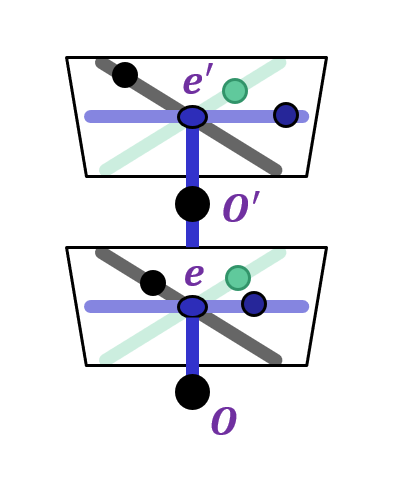
Epipole is “focus of expansion” and coincides with the principal point of the camera
Epipolar lines go out from principal point
Next class: