CSE559A Lecture 21
Continue on optical flow
The brightness constancy constraint
Given the gradients and , can we uniquely recover the motion ?
- Suppose satisfies the constraint:
- Then for any s.t.
- Interpretation: the component of the flow perpendicular to the gradient (i.e., parallel to the edge) cannot be recovered!
Aperture problem
- The brightness constancy constraint is only valid for a small patch in the image
- For a large motion, the patch may look very different
Consider the barber pole illusion
Estimating optical flow (Lucas-Kanade method)
- Consider a small patch in the image
- Assume the motion is constant within the patch
- Then we can solve for the motion by minimizing the error:
How to get more equations for a pixel? Spatial coherence constraint: assume the pixel’s neighbors have the same (𝑢,𝑣) If we have 𝑛 pixels in the neighborhood, then we can set up a linear least squares system:
Lucas-Kanade flow
Let
The solution is
Lucas-Kanade flow:
- Find minimizing
- use Taylor approximation of for small shifts to obtain closed-form solution
Refinement for Lucas-Kanade
In some cases, the Lucas-Kanade method may not work well:
- The motion is large (larger than a pixel)
- A point does not move like its neighbors
- Brightness constancy does not hold
Iterative refinement (for large motion)
Iterative Lukas-Kanade Algorithm
- Estimate velocity at each pixel by solving Lucas-Kanade equations
- Warp It towards It+1 using the estimated flow field
- use image warping techniques
- Repeat until convergence
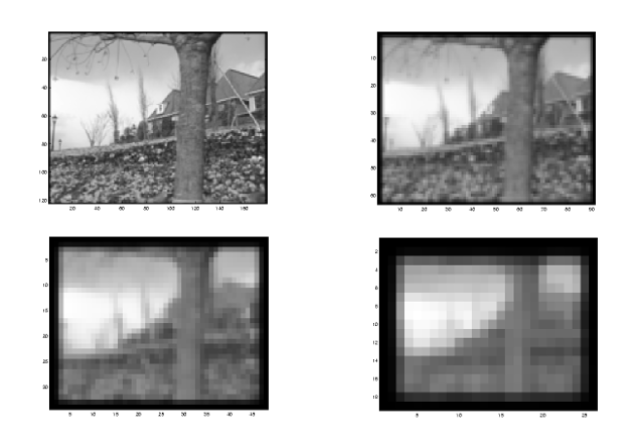
Iterative refinement is limited due to Aliasing
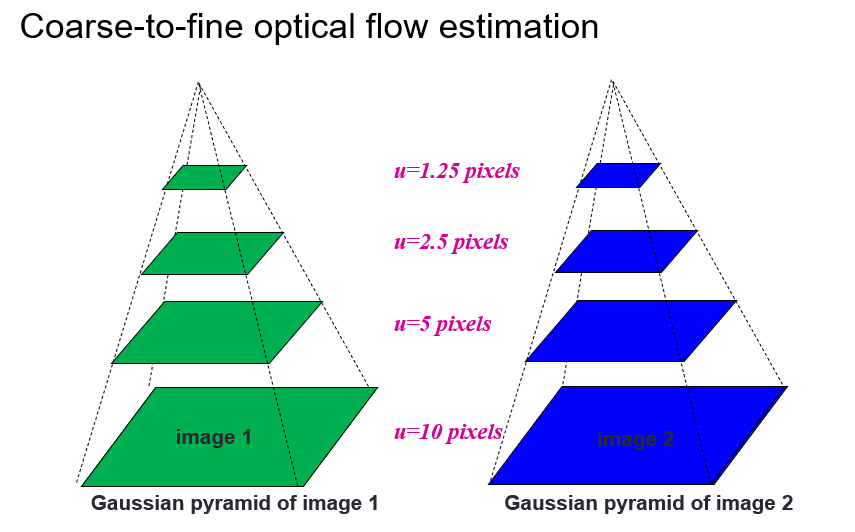
Coarse-to-fine refinement (for large motion)
- Estimate flow at a coarse level
- Refine the flow at a finer level
- Use the refined flow to warp the image
- Repeat until convergence
Representing moving images with layers (for a point may not move like its neighbors)
- The image can be decomposed into a moving layer and a stationary layer
- The moving layer is the layer that moves
- The stationary layer is the layer that does not move
SOTA models
2009
Start with something similar to Lucas-Kanade
- gradient constancy
- energy minimization with smoothing term
- region matching
- keypoint matching (long-range)
2015
Deep neural networks
- Use a deep neural network to represent the flow field
- Use synthetic data to train the network (floating chairs)
2023
GMFlow
use Transformer to model the flow field
Robust Fitting of parametric models
Challenges:
- Noise in the measured feature locations
- Extraneous data: clutter (outliers), multiple lines
- Missing data: occlusions
Least squares fitting
Normal least squares fitting
is not a good model for the data since there might be vertical lines
Instead we use total least squares
Line parametrization:
is the unit normal to the line (i.e., ) is the distance between the line and the origin Perpendicular distance between point and line (assuming ):
Objective function:
Solve for first: Plugging back in:
We want to find that minimizes subject to Solution is given by the eigenvector of associated with the smallest eigenvalue
Drawbacks:
- Sensitive to outliers
Robust fitting
General approach: find model parameters 𝜃 that minimize
: residual of w.r.t. model parameters : robust function with scale parameter , e.g.,
Nonlinear optimization problem that must be solved iteratively
- Least squares solution can be used for initialization
- Scale of robust function should be chosen carefully
Drawbacks:
- Need to manually choose the robust function and scale parameter
RANSAC
Voting schemes
Random sample consensus: very general framework for model fitting in the presence of outliers
Outline:
- Randomly choose a small initial subset of points
- Fit a model to that subset
- Find all inlier points that are “close” to the model and reject the rest as outliers
- Do this many times and choose the model with the most inliers