CSE5519 Advances in Computer Vision (Topic E: 2021 and before: Deep Learning for Geometric Computer Vision)
This topic is presented by Me. and will be the most detailed one for this course, perhaps.
Data set of the scene: KITTI
PoseNet
A Convolutional Network for Real-Time 6-DOF Camera Relocalization (ICCV 2015)
Problem solving:
Camera Pose: Camera position and orientation.
Convolutional neural network (convnet) we train to estimate camera pose directly from a monocular image, . Our network outputs a pose vector , given by a 3D camera position and orientation represented by quaternion q:
is a quaternion, is a 3D camera position.
Arbitrary 4D values are easily mapped to legitimate rotations by normalizing them to unit length.
Regression function
Use Stochastic Gradient Descent (SGD) to optimize the network parameters.
is the estimated camera position, is the ground truth camera position, is the estimated camera orientation, is the ground truth camera orientation.
is a hyperparameter that scale the loss of the camera orientation so that the network can balance on estimating the camera position and orientation approximately the same weight.
Network architecture
Based on GoogLeNet (SOTA in 2014), but with a few changes:
- Replace all three softmax classifiers with affine regressors.
- Insert another fully connected layer before final regressor of feature size 2048
- At test time, normalize the quaternion to unit length.
Architecture
from network import Network
class GoogLeNet(Network):
def setup(self):
(self.feed('data')
.conv(7, 7, 64, 2, 2, name='conv1')
.max_pool(3, 3, 2, 2, name='pool1')
.lrn(2, 2e-05, 0.75, name='norm1')
.conv(1, 1, 64, 1, 1, name='reduction2')
.conv(3, 3, 192, 1, 1, name='conv2')
.lrn(2, 2e-05, 0.75, name='norm2')
.max_pool(3, 3, 2, 2, name='pool2')
.conv(1, 1, 96, 1, 1, name='icp1_reduction1')
.conv(3, 3, 128, 1, 1, name='icp1_out1'))
(self.feed('pool2')
.conv(1, 1, 16, 1, 1, name='icp1_reduction2')
.conv(5, 5, 32, 1, 1, name='icp1_out2'))
(self.feed('pool2')
.max_pool(3, 3, 1, 1, name='icp1_pool')
.conv(1, 1, 32, 1, 1, name='icp1_out3'))
(self.feed('pool2')
.conv(1, 1, 64, 1, 1, name='icp1_out0'))
(self.feed('icp1_out0',
'icp1_out1',
'icp1_out2',
'icp1_out3')
.concat(3, name='icp2_in')
.conv(1, 1, 128, 1, 1, name='icp2_reduction1')
.conv(3, 3, 192, 1, 1, name='icp2_out1'))
(self.feed('icp2_in')
.conv(1, 1, 32, 1, 1, name='icp2_reduction2')
.conv(5, 5, 96, 1, 1, name='icp2_out2'))
(self.feed('icp2_in')
.max_pool(3, 3, 1, 1, name='icp2_pool')
.conv(1, 1, 64, 1, 1, name='icp2_out3'))
(self.feed('icp2_in')
.conv(1, 1, 128, 1, 1, name='icp2_out0'))
(self.feed('icp2_out0',
'icp2_out1',
'icp2_out2',
'icp2_out3')
.concat(3, name='icp2_out')
.max_pool(3, 3, 2, 2, name='icp3_in')
.conv(1, 1, 96, 1, 1, name='icp3_reduction1')
.conv(3, 3, 208, 1, 1, name='icp3_out1'))
(self.feed('icp3_in')
.conv(1, 1, 16, 1, 1, name='icp3_reduction2')
.conv(5, 5, 48, 1, 1, name='icp3_out2'))
(self.feed('icp3_in')
.max_pool(3, 3, 1, 1, name='icp3_pool')
.conv(1, 1, 64, 1, 1, name='icp3_out3'))
(self.feed('icp3_in')
.conv(1, 1, 192, 1, 1, name='icp3_out0'))
(self.feed('icp3_out0',
'icp3_out1',
'icp3_out2',
'icp3_out3')
.concat(3, name='icp3_out')
.avg_pool(5, 5, 3, 3, padding='VALID', name='cls1_pool')
.conv(1, 1, 128, 1, 1, name='cls1_reduction_pose')
.fc(1024, name='cls1_fc1_pose')
.fc(3, relu=False, name='cls1_fc_pose_xyz'))
(self.feed('cls1_fc1_pose')
.fc(4, relu=False, name='cls1_fc_pose_wpqr'))
(self.feed('icp3_out')
.conv(1, 1, 112, 1, 1, name='icp4_reduction1')
.conv(3, 3, 224, 1, 1, name='icp4_out1'))
(self.feed('icp3_out')
.conv(1, 1, 24, 1, 1, name='icp4_reduction2')
.conv(5, 5, 64, 1, 1, name='icp4_out2'))
(self.feed('icp3_out')
.max_pool(3, 3, 1, 1, name='icp4_pool')
.conv(1, 1, 64, 1, 1, name='icp4_out3'))
(self.feed('icp3_out')
.conv(1, 1, 160, 1, 1, name='icp4_out0'))
(self.feed('icp4_out0',
'icp4_out1',
'icp4_out2',
'icp4_out3')
.concat(3, name='icp4_out')
.conv(1, 1, 128, 1, 1, name='icp5_reduction1')
.conv(3, 3, 256, 1, 1, name='icp5_out1'))
(self.feed('icp4_out')
.conv(1, 1, 24, 1, 1, name='icp5_reduction2')
.conv(5, 5, 64, 1, 1, name='icp5_out2'))
(self.feed('icp4_out')
.max_pool(3, 3, 1, 1, name='icp5_pool')
.conv(1, 1, 64, 1, 1, name='icp5_out3'))
(self.feed('icp4_out')
.conv(1, 1, 128, 1, 1, name='icp5_out0'))
(self.feed('icp5_out0',
'icp5_out1',
'icp5_out2',
'icp5_out3')
.concat(3, name='icp5_out')
.conv(1, 1, 144, 1, 1, name='icp6_reduction1')
.conv(3, 3, 288, 1, 1, name='icp6_out1'))
(self.feed('icp5_out')
.conv(1, 1, 32, 1, 1, name='icp6_reduction2')
.conv(5, 5, 64, 1, 1, name='icp6_out2'))
(self.feed('icp5_out')
.max_pool(3, 3, 1, 1, name='icp6_pool')
.conv(1, 1, 64, 1, 1, name='icp6_out3'))
(self.feed('icp5_out')
.conv(1, 1, 112, 1, 1, name='icp6_out0'))
(self.feed('icp6_out0',
'icp6_out1',
'icp6_out2',
'icp6_out3')
.concat(3, name='icp6_out')
.avg_pool(5, 5, 3, 3, padding='VALID', name='cls2_pool')
.conv(1, 1, 128, 1, 1, name='cls2_reduction_pose')
.fc(1024, name='cls2_fc1')
.fc(3, relu=False, name='cls2_fc_pose_xyz'))
(self.feed('cls2_fc1')
.fc(4, relu=False, name='cls2_fc_pose_wpqr'))
(self.feed('icp6_out')
.conv(1, 1, 160, 1, 1, name='icp7_reduction1')
.conv(3, 3, 320, 1, 1, name='icp7_out1'))
(self.feed('icp6_out')
.conv(1, 1, 32, 1, 1, name='icp7_reduction2')
.conv(5, 5, 128, 1, 1, name='icp7_out2'))
(self.feed('icp6_out')
.max_pool(3, 3, 1, 1, name='icp7_pool')
.conv(1, 1, 128, 1, 1, name='icp7_out3'))
(self.feed('icp6_out')
.conv(1, 1, 256, 1, 1, name='icp7_out0'))
(self.feed('icp7_out0',
'icp7_out1',
'icp7_out2',
'icp7_out3')
.concat(3, name='icp7_out')
.max_pool(3, 3, 2, 2, name='icp8_in')
.conv(1, 1, 160, 1, 1, name='icp8_reduction1')
.conv(3, 3, 320, 1, 1, name='icp8_out1'))
(self.feed('icp8_in')
.conv(1, 1, 32, 1, 1, name='icp8_reduction2')
.conv(5, 5, 128, 1, 1, name='icp8_out2'))
(self.feed('icp8_in')
.max_pool(3, 3, 1, 1, name='icp8_pool')
.conv(1, 1, 128, 1, 1, name='icp8_out3'))
(self.feed('icp8_in')
.conv(1, 1, 256, 1, 1, name='icp8_out0'))
(self.feed('icp8_out0',
'icp8_out1',
'icp8_out2',
'icp8_out3')
.concat(3, name='icp8_out')
.conv(1, 1, 192, 1, 1, name='icp9_reduction1')
.conv(3, 3, 384, 1, 1, name='icp9_out1'))
(self.feed('icp8_out')
.conv(1, 1, 48, 1, 1, name='icp9_reduction2')
.conv(5, 5, 128, 1, 1, name='icp9_out2'))
(self.feed('icp8_out')
.max_pool(3, 3, 1, 1, name='icp9_pool')
.conv(1, 1, 128, 1, 1, name='icp9_out3'))
(self.feed('icp8_out')
.conv(1, 1, 384, 1, 1, name='icp9_out0'))
(self.feed('icp9_out0',
'icp9_out1',
'icp9_out2',
'icp9_out3')
.concat(3, name='icp9_out')
.avg_pool(7, 7, 1, 1, padding='VALID', name='cls3_pool')
.fc(2048, name='cls3_fc1_pose')
.fc(3, relu=False, name='cls3_fc_pose_xyz'))
(self.feed('cls3_fc1_pose')
.fc(4, relu=False, name='cls3_fc_pose_wpqr'))Unsupervised Learning of Depth and Ego-Motion From Video
(CVPR 2017)
This is a method that estimates both depth and camera pose motion from a single video using CNN.
Jointly training a single-view depth CNN and a camera pose estimation CNN form unlabelled monocular video sequences.
Assumptions for PoseNet & DepthNet
- The scene is static and the only motion is the camera motion.
- There is no occlusion/disocclusion between the target view and the source view.
- The surface is Lambertian.
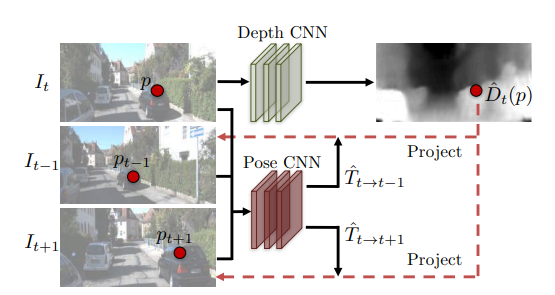
Let be three consecutive frames in the video.
First, we use the DepthNet to estimate the depth of to obtain . We use the PoseNet to estimate the camera pose motion between and to obtain two transition vector and .
Then use the information we have from and with frame and to synthesize the image from and .
Note that is the synthesized prediction for .
Loss function for PoseNet & DepthNet
Notice that in the training process, we can generate the supervision for PoseNet & DepthNet by using view synthesis as supervision.
View synthesis as supervision
Let be the video sequence. Note that is the pixel value of at point .
The loss function generated by view synthesis is:
Differentiable depth image-based rendering
Assume that the transition and rotation between the frames are smooth and differentiable.
Let denote the pixel coordinates of at time . Let denote the camera intrinsic matrix. We can always obtain ‘s projected coordinates to our source view by the formula:
Then we use spacial transformer network to sample continuous pixel coordinates.
Compensation for PoseNet & DepthNet
Since it’s inevitable that there are some moving objects or occlusions between the target view and the source view, in pose net we also train a few additional layers to estimate our confidence (explainability mask) of the camera motion.
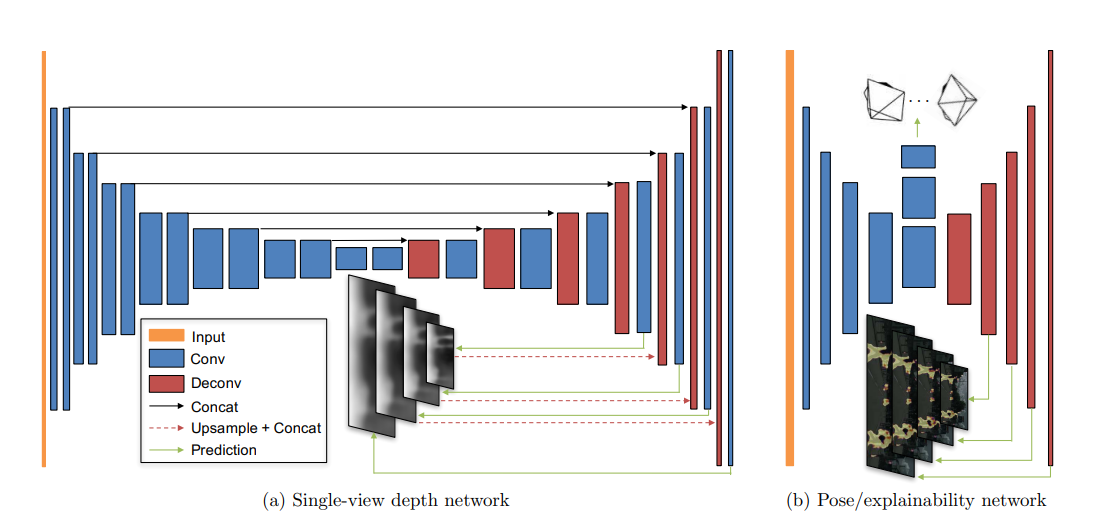
Architecture for PoseNet & DepthNet
Unsupervised Monocular Depth Estimation with Left-Right Consistency
(CVPR 2017)
This is a method that use pair of images as Left and Right eye to estimate depth. Increased consistency by flipping the right-left relation.
Intuition: Given a calibarated pair of binocular cameras, if we can learn a function that is able to reconstruct one image from the other, then we have learned something about the depth of the scene.
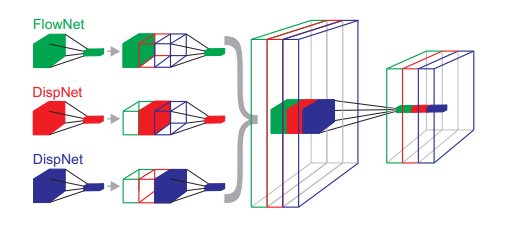
DispNet and Scene flow
Scene flow
Scene flow is the underlying 3D motion field that can be computed from stereo videos or RGBD videos.
Note, these 3D quantities can be computed only in the case of known camera intrinsics (i.e., matrix) and extrinsics (i.e., camera pose, translation, etc.).
Scene flow can be reconstructed only for surface points that are visible in both the left and the right frame.
Especially in the context of convolutional networks, it is particularly interesting to estimate also depth and motion in partially occluded areas
Disparity
Disparity is the difference in the x-coordinates of the same point in the left and right images.
If there is time difference between the “left” and “right” images, by the difference between the disparity, we can estimate the scene flow, that is, non-rigid motion of the scene.
Object that have the same disparity in both images is “moving along with the camera”.
Object that is moving away, or moving toward the camera, will have higher disparity.
Assumptions for Left-right consistency Network
- Lambertian surface.
- No occlusion/disocclusion between the left and right image (for computing scene flow).
Loss functions for Left-right consistency Network
The loss function consists of three parts:
Let denote the number of pixels in the image.
Appearance matching loss
Let denote the left image, denote the right image, denote the left image reconstructed from the right image.
denote the left image reconstructed from the right image with the predicted disparity map .
The appearance matching loss for left image is:
Here is the structural similarity index.
link to the paper: structure similarity index
is a hyperparameter that balances the importance of the structural similarity and the pixel-wise difference. In this paper, .
Disparity Smoothness Loss
Let denote the disparity gradient. and are the disparity gradient in the x and y directions respectively on the left image of pixel .
The disparity smoothness loss is:
Left-right disparity consistency loss
Our network produces two disparity maps, and . We can use the left-right consistency loss to enforce the consistency between the two disparity maps.
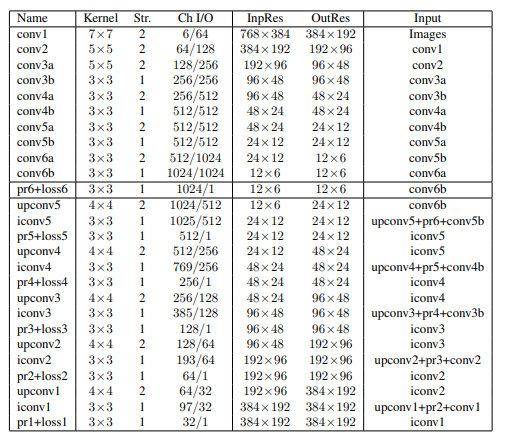
Architecture of Left-right consistency Network

GeoNet
Unsupervised Learning of Dense Depth, Optical Flow and Camera Pose (CVPR 2018)
Problem solving:
Depth Estimation from single monocular image.
Architecture for GeoNet
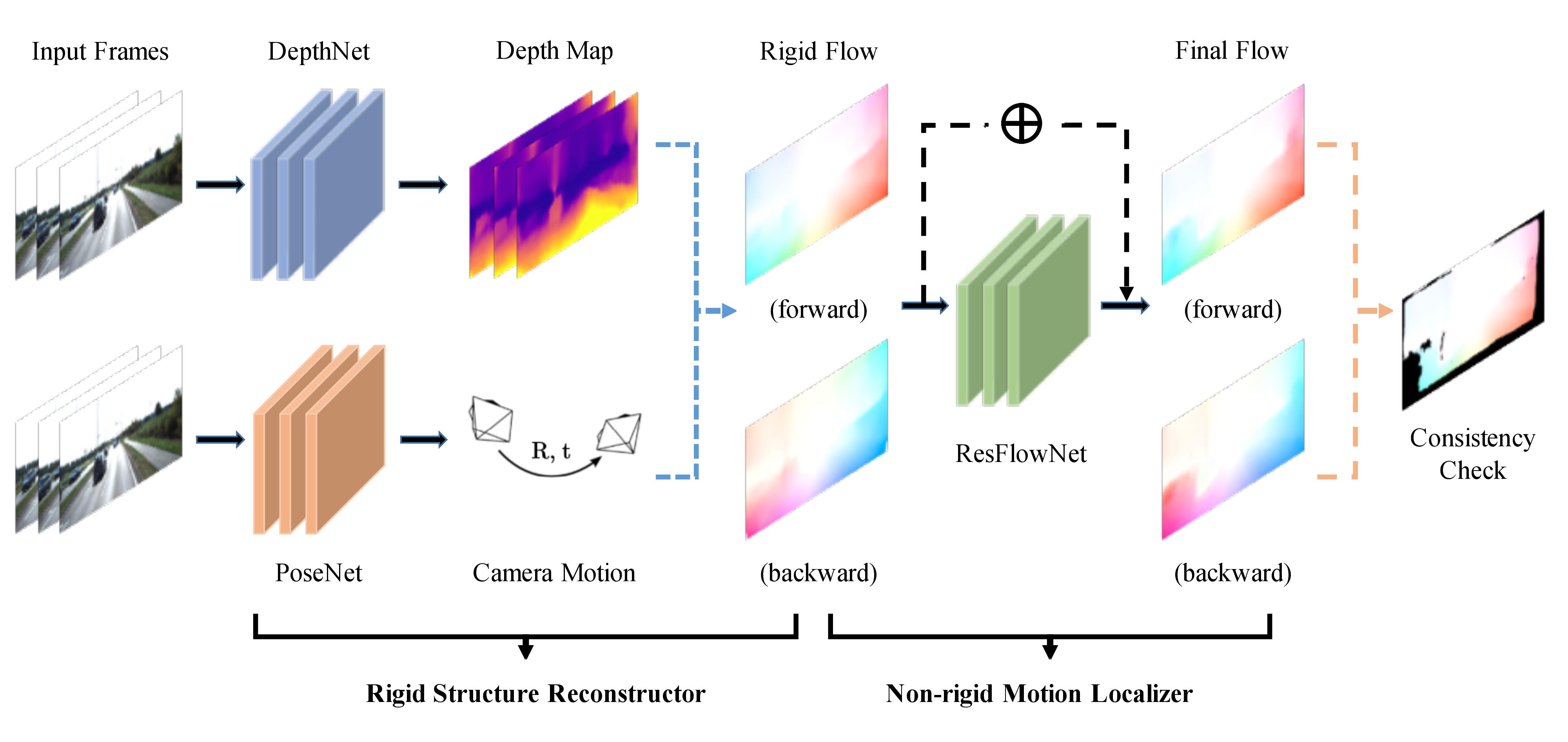
Rigid structure constructor
Combines the DepthNet and PoseNet to estimate the depth and camera pose motion from Unsupervised Learning of Depth and Ego-Motion From Video.
We denote the output of the Rigid structure constructor from frame to as . The function output is a 2D vector showing the shift of the pixel coordinates.
Recall from previous paper,
Non-rigid motion localizer
Use Left-right consistency to estimate the non-rigid motion by training the ResFlowNet.
We denote the output of the Non-rigid motion localizer from frame to as . SO the final full flow prediction is .
Let denote the inverse wrapped image from frame to . Note that is the prediction of from , using the rigid structure constructor.
Recall from previous paper, we rename the to .
Then we use to enforce the smoothness of the disparity map.
Replacing with , in (1) and (2), we get the and for the non-rigid motion localizer.
Geometric consistency enforcement
Finally, we use an additional geometric consistency enforcement to handle non-Lambertian surfaces (e.g., metal, plastic, etc.).
This is done by additional term in the loss function.
Let .
Let denote the function belows for arbitrary :
The geometric consistency enforcement loss is:
Loss function for GeoNet
Let be the set of pyramid image scales. denote the set of all pairs of frames in the video and their inverse pairs, .
are hyperparameters that balance the importance of the different losses.
Results for monocular depth estimation
